Leetcode|排序
图解算法数据结构 - LeetBook - 力扣(LeetCode)全球极客挚爱的技术成长平台 (leetcode-cn.com)
排序算法简介⁍
概述⁍
排序算法用作实现列表的排序,列表元素可以是整数,也可以是浮点数、字符串等其他数据类型。生活中有许多需要排序算法的场景,例如:
- 整数排序: 对于一个整数数组,我们希望将所有数字从小到大排序;
- 字符串排序: 对于一个姓名列表,我们希望将所有单词按照字符先后排序;
- 自定义排序: 对于任意一个 已定义比较规则 的集合,我们希望将其按规则排序;
同时,某些算法需要在排序算法的基础上使用(即在排序数组上运行),例如:
- 二分查找: 根据数组已排序的特性,才能每轮确定排除两部分中的哪一部分;
- 双指针: 例如合并两个排序链表,根据已排序特性,才能通过双指针移动在线性时间内将其合并为一个排序链表。
接下来,本文将从「常见排序算法」、「分类方法」、「时间与空间复杂度」三方面入手,简要介绍排序算法。「各排序算法详细介绍」请见后续专栏文章。
常见算法⁍
常见排序算法包括「冒泡排序」、「插入排序」、「选择排序」、「快速排序」、「归并排序」、「堆排序」、「基数排序」、「桶排序」。如下图所示,为各排序算法的核心特性与时空复杂度总结。

如下图所示,为在 「随机乱序」、「接近有序」、「完全倒序」、「少数独特」四类输入数据下,各常见排序算法的排序过程。






分类方法⁍
排序算法主要可根据 稳定性 、就地性 、自适应性 分类。理想的排序算法具有以下特性:
- 具有稳定性,即相等元素的相对位置不变化;
- 具有就地性,即不使用额外的辅助空间;
- 具有自适应性,即时间复杂度受元素分布影响;
特别地,任意排序算法都 不同时具有以上所有特性 。因此,排序算法的选型使用取决于具体的列表类型、元素数量、元素分布情况等应用场景特点。
稳定性:⁍
根据 相等元素 在数组中的 相对顺序 是否被改变,排序算法可分为「稳定排序」和「非稳定排序」两类。
- 「稳定排序」在完成排序后,不改变 相等元素在数组中的相对顺序。例如:冒泡排序、插入排序、归并排序、基数排序、桶排序。
- 「非稳定排序」在完成排序后,相等素在数组中的相对位置 可能被改变 。例如:选择排序、快速排序、堆排序。
就地性:⁍
根据排序过程中 是否使用额外内存(辅助数组),排序算法可分为「原地排序」和「异地排序」两类。一般地,由于不使用外部内存,原地排序相比非原地排序的执行效率更高。
- 「原地排序」不使用额外辅助数组,例如:冒泡排序、插入排序、选择排序、快速排序、堆排序。
「非原地排序」使用额外辅助数组,例如:归并排序、基数排序、桶排序。
自适应性:⁍
根据算法 时间复杂度 是否 受待排序数组的元素分布影响 ,排序算法可分为「自适应排序」和「非自适应排序」两类。
- 「自适应排序」的时间复杂度受元素分布影响;例如:冒泡排序、插入排序、快速排序、桶排序。
- 「非自适应排序」的时间复杂度恒定;例如:选择排序、归并排序、堆排序、基数排序。
比较类:⁍
比较类排序基于元素之间的 比较算子(小于、相等、大于)来决定元素的相对顺序;相对的,非比较排序则不基于比较算子实现。
- 「比较类排序」基于元素之间的比较完成排序,例如:冒泡排序、插入排序、选择排序、快速排序、归并排序、堆排序。
- 「非比较类排序」不基于元素之间的比较完成排序,例如:基数排序、桶排序。
时空复杂度⁍
总体上看,排序算法追求时间与空间复杂度最低。而即使某些排序算法的时间复杂度相等,但实际性能还受 输入列表性质、元素数量、元素分布等 等因素影响。
设输入列表元素数量为$N$,常见排序算法的「时间复杂度」和「空间复杂度」如下图所示。

对于上表,需要特别注意:
- 「基数排序」适用于正整数、字符串、特定格式的浮点数排序,$k$ 为最大数字的位数;「桶排序」中 $k$ 为桶的数量。
- 普通「冒泡排序」的最佳时间复杂度为 $O(N^2)$,通过增加标志位实现 提前返回 ,可以将最佳时间复杂度降低至 $O(N)$。
- 在输入列表完全倒序下,普通「快速排序」的空间复杂度劣化至 $O(N)$,通过代码优化 Tail Call Optimization 保持算法递归较短子数组,可以将最差递归深度降低至 $\log N$。
- 普通「快速排序」总以最左或最右元素为基准数,因此在输入列表有序或倒序下,时间复杂度劣化至 $O(N^2)$;通过 随机选择基准数 ,可极大减少此类最差情况发生,尽可能地保持 $O(N \log N)$的时间复杂度。
- 若输入列表是数组,则归并排序的空间复杂度为 $O(N)$ ;而若排序 链表 ,则「归并排序」不需要借助额外辅助空间,空间复杂度可以降低至 $O(1)$ 。
冒泡排序⁍
- 内循环: 使用相邻双指针
j,j + 1从左至右遍历,依次比较相邻元素大小,若左元素大于右元素则将它们交换;遍历完成时,最大元素会被交换至数组最右边 。 - 外循环: 不断重复「内循环」,每轮将当前最大元素交换至 剩余未排序数组最右边 ,直至所有元素都被交换至正确位置时结束。
1 | |
复杂度分析:⁍
-
时间复杂度 $O(N^2)$ : 其中 $N$ 为输入数组的元素数量;「外循环」共 $N - 1$ 轮,使用 $O(N)$ 时间;每轮「内循环」分别遍历 $N - 1$ , $N - 2$ , $\cdots$ , $2$ , $1$ 次,平均 $\frac{N}{2}$ 次,使用 $O(\frac{N}{2}) = O(N)$ 时间;因此,总体时间复杂度为 $O(N^2)$ 。
-
空间复杂度 $O(1)$ : 只需原地交换元素,使用常数大小的额外空间。
算法特性:⁍
-
时间复杂度为 $O(N^2)$ ,因为其是通过不断 交换元素 实现排序(交换 2 个元素需要 3 次赋值操作),因此速度较慢;
-
原地: 指针变量仅使用常数大小额外空间,空间复杂度为 $O(1)$ ;
-
稳定: 元素值相同时不交换,因此不会改变相同元素的相对位置;
-
自适应: 通过增加一个标志位
flag,若某轮内循环未执行任何交换操作时,说明已经完成排序,因此直接返回。此优化使冒泡排序的最优时间复杂度达到 $O(N)$(当输入数组已排序时);
快速排序⁍
快速排序算法有两个核心点,分别为 哨兵划分 和 递归 。
-
哨兵划分: 以数组某个元素(一般选取首元素)为 基准数 ,将所有小于基准数的元素移动至其左边,大于基准数的元素移动至其右边。
- 流程: 取基准;将基准后面的元素进行划分——左边的是小于基准的元素,右边的是大于基准的元素;将基准交换至临界处;完毕。

- 流程: 取基准;将基准后面的元素进行划分——左边的是小于基准的元素,右边的是大于基准的元素;将基准交换至临界处;完毕。
-
递归: 对 左子数组 和 右子数组 分别递归执行 哨兵划分,直至子数组长度为 1 时终止递归,即可完成对整个数组的排序。
如下图所示,为示例数组
[2,4,1,0,3,5]的快速排序流程。观察发现,快速排序和 二分法 的原理类似,都是以 $\log$ 时间复杂度实现搜索区间缩小。 {:width=550}
{:width=550}
1 | |
复杂度分析⁍
-
时间复杂度:
-
最佳 $\Omega(N \log N )$ : 最佳情况下, 每轮哨兵划分操作将数组划分为等长度的两个子数组;哨兵划分操作为线性时间复杂度 $O(N)$ ;递归轮数共 $O(\log N)$ 。
-
平均 $\Theta(N \log N)$ : 对于随机输入数组,哨兵划分操作的递归轮数也为 $O(\log N)$ 。
-
最差 $O(N^2)$ : 对于某些特殊输入数组,每轮哨兵划分操作都将长度为 $N$ 的数组划分为长度为 $1$ 和 $N - 1$ 的两个子数组,此时递归轮数达到 $N$ 。
通过 「随机选择基准数」优化,可尽可能避免出现最差情况。
每轮在子数组中随机选择一个元素作为基准数,这样就可以极大概率避免以上劣化情况。
值得注意的是,由于仍然可能出现最差情况,因此快速排序的最差时间复杂度仍为$O(N^2)$。
1
2
3
4
5
6
7int partition(int[] nums, int l, int r) {
// 在闭区间 [l, r] 随机选取任意索引,并与 nums[l] 交换
int ra = (int)(l + Math.random() * (r - l + 1));
swap(nums, l, ra);
// 以 nums[l] 作为基准数,下同
}
-
-
空间复杂度 $O(N)$ : 快速排序的递归深度最好与平均皆为 $\log N$ ;输入数组完全倒序下,达到最差递归深度 $N$ 。
通过「Tail Call」优化,可将最差空间复杂度降低至 $O(\log N)$ 。
每轮递归时,仅对 较短的子数组 执行哨兵划分
partition(),就可将最差的递归深度控制在 $O(\log N)$ (每轮递归的子数组长度都 $\leq$ 当前数组长度 $/ 2$ ),即实现最差空间复杂度 $O(\log N)$ 。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16void quickSort(int[] nums, int l, int r) {
// 子数组长度为 1 时终止递归
while (l < r) {
// 哨兵划分操作
int i = partition(nums, l, r);
// 仅递归至较短子数组,控制递归深度
if (i - l < r - i) {
quickSort(nums, l, i - 1);
l = i + 1;
} else {
quickSort(nums, i + 1, r);
r = i - 1;
}
}
}
算法特性⁍
-
虽然平均时间复杂度与「归并排序」和「堆排序」一致,但在实际使用中快速排序 效率更高 ,这是因为:
-
最差情况稀疏性: 虽然快速排序的最差时间复杂度为 $O(N^2)$ ,差于归并排序和堆排序,但统计意义上看,这种情况出现的机率很低。大部分情况下,快速排序以 $O(N \log N)$ 复杂度运行。
-
缓存使用效率高: 哨兵划分操作时,将整个子数组加载入缓存中,访问元素效率很高;堆排序需要跳跃式访问元素,因此不具有此特性。
-
常数系数低: 在提及的三种算法中,快速排序的 比较、赋值、交换 三种操作的综合耗时最低(类似于插入排序快于冒泡排序的原理)。
-
-
原地: 不用借助辅助数组的额外空间,递归仅使用 $O(\log N)$ 大小的栈帧空间。
-
非稳定: 哨兵划分操作可能改变相等元素的相对顺序。
-
自适应: 对于极少输入数据,每轮哨兵划分操作都将长度为 $N$ 的数组划分为长度 $1$ 和 $N - 1$ 两个子数组,此时时间复杂度劣化至 $O(N^2)$ 。
归并排序⁍
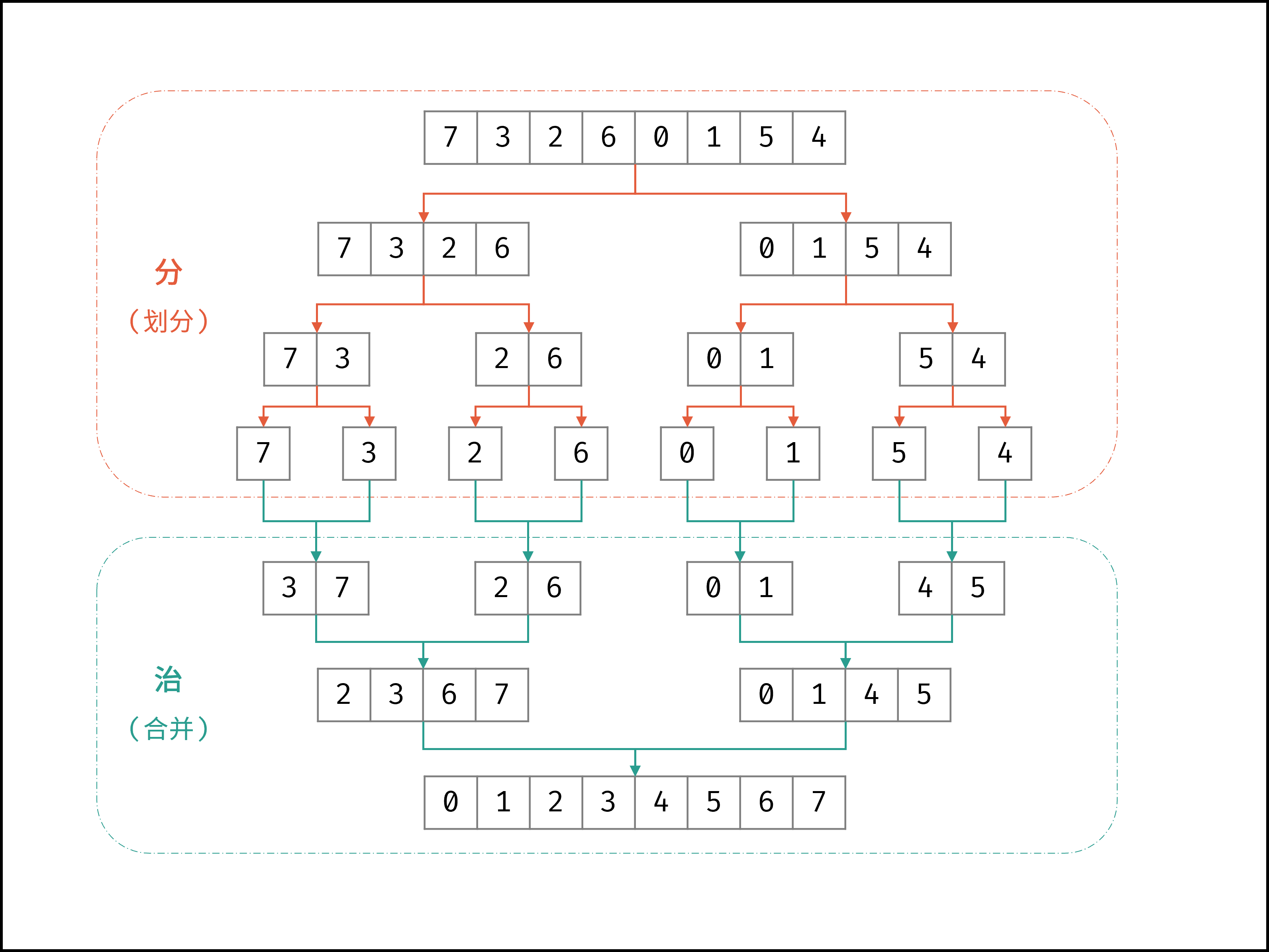
归并排序体现了 “分而治之” 的算法思想,具体为:
-
「分」: 不断将数组从 中点位置 划分开,将原数组的排序问题转化为子数组的排序问题;
-
「治」: 划分到子数组长度为 1 时,开始向上合并,不断将 左右两个较短排序数组 合并为 一个较长排序数组,直至合并至原数组时完成排序;
如下图所示,为数组
[7,3,2,6,0,1,5,4]的归并排序过程。
 {:width=500}
{:width=500}
算法流程:⁍
-
递归划分:
-
计算数组中点 $m$ ,递归划分左子数组
merge_sort(l, m)和右子数组merge_sort(m + 1, r); -
当 $l \geq r$ 时,代表子数组长度为 1 或 0 ,此时 终止划分 ,开始合并;
-
-
合并子数组:
-
暂存数组 $nums$ 闭区间 $[l, r]$ 内的元素至辅助数组 $tmp$ ;
-
循环合并: 设置双指针 $i$ , $j$ 分别指向 $tmp$ 的左 / 右子数组的首元素;
注意: $nums$ 子数组的左边界、中点、右边界分别为 $l$ , $m$ , $r$ ,而辅助数组 $tmp$ 中的对应索引为 $0$ , $m - l$ , $r - l$ ;
- 当 $i == m - l + 1$ 时: 代表左子数组已合并完,因此添加右子数组元素 $tmp[j]$ ,并执行 $j = j + 1$ ;
- 否则,当 $j == r - l + 1$ 时: 代表右子数组已合并完,因此添加左子数组元素 $tmp[i]$ ,并执行 $i = i + 1$ ;
- 否则,当 $tmp[i] \leq tmp[j]$ 时: 添加左子数组元素 $tmp[i]$ ,并执行 $i = i + 1$ ;
- 否则(即当 $tmp[i] > tmp[j]$ 时): 添加右子数组元素 $tmp[j]$ ,并执行 $j = j + 1$ ;
-
1 | |
复杂度分析⁍
-
时间复杂度: 最佳 $\Omega(N \log N )$ ,平均 $\Theta(N \log N)$ ,最差 $O(N \log N)$ 。
-
空间复杂度 $O(N)$ : 合并过程中需要借助辅助数组 $tmp$ ,使用 $O(N)$ 大小的额外空间;划分的递归深度为 $\log N$ ,使用 $O(\log N)$ 大小的栈帧空间。
-
若输入数据是 链表 ,则归并排序的空间复杂度可被优化至 $O(1)$ ,这是因为:
-
通过应用「双指针法」,可在 $O(1)$ 空间下完成两个排序链表的合并,省去辅助数组 $tmp$ 使用的额外空间;
-
通过使用「迭代」代替「递归划分」,可省去递归使用的栈帧空间;
详情请参考:148. 排序链表
-
算法特性⁍
-
非原地: 辅助数组 $tmp$ 需要使用额外空间。
-
稳定: 归并排序不改变相等元素的相对顺序。
-
非自适应: 对于任意输入数据,归并排序的时间复杂度皆相同。




